- The number of registered voters in a certain couny is 78483. What is the number of people written in words?
- Seventy eight thousand four hundred and eighty four
- Seven hundred and eighty four thousand four hundred and three
- Seven thousand four hundred and eighty three
- Seventy eight thousand four hundred and eighty three
- What is the place value of digit 9 in the number 597624?
- Hundreds
- Tens of thousands
- Thousands
- Hundreds of thousands
- In the year 2022, a total of 390768 passengers travelled by train. What is the total value of digit 0?
- Thousands
- 1000
- 0
- 90000
- Kericho tea factory sold the following amount of tea leaves in a given month.
Week 1 week 2 week 3 week 4 29500kgs 81760kgs 59605kgs 18607kgs
Arrange the mass of the tea leaves in a decreasing order- 81760, 59605, 18607, 29500
- 18607, 29500, 59605, 81760
- 81760, 18607, 59605, 29500
- 81760, 59605, 29500, 18607
- Roy spent sh. 25678 to buy a television set. How much did he spend on the television set to the nearest thousands?
- 25000
- 25700
- 26000
- 30000
- Which of these sets of numbers is divisible by 10?
- 468, 800, 2010, 17000
- 1275, 550, 110, 560
- 17575, 4800, 50, 900
- 24400, 2500, 4320, 1600
- Work out:
62.304
– 41.009
_______- 21.295
- 21.205
- 21.205
- 20.295
- How many ¼ kgs are there in 24kgs of rice?
- 96
- 24
- 20
- 6
- Write this fraction in its simplest form, 48/84
- 24/42
- 12/21
- 7/42
- 4/7
- Work out the perimeter of the figure below
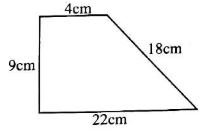
- 130cm
- 49cm
- 53cm
- 89cm
- What is the place value of digit 6 in the number 14.396?\
- Hundredths
- Tenths
- Hundreds
- Thousandths
- Atieno bought maize flour in bags of 150kg and 100kg. What is the greatest mass of maize that can be measured equally from each of the bags without a remainder?
- 100
- 150
- 50
- 250
- Karura forest has 120416 trees, Ngong forest has 41222 trees while Nyabene forest has 227634 trees. How many trees do the three forests have altogether?
- 398272
- 388262
- 161638
- 389272
- Mr. Musa shared 269 Science and Technology textbooks equally among 18 learners. How many books remained after sharing?
- 14
- 17
- 24
- 16
- Fill in the missing number
3/7 = /14- 6
- 12
- 9
- 10
- Jayden wakes up in the morning at the time shown by the digital clock below.

- 6.45pm
- 6.15am
- 6.15pm
- 6.45am
Below is a price list. Use it to answer questions 17 and 18
| Item | price |
| 2kg of maize flour | sh. 219 |
| 1kg of rice | sh. 175 |
| 2 litres of cooking oil | sh. 645 |
| 1 loaf of bread | sh. 84 |
| 1 packet of milk | sh.56 |
- Vanessa bought 2 litres of cooking oil and a packet of milk. She gave the shopkeeper sh. 1000. How much balance did she get?
- sh. 399
- sh. 301
- sh. 299
- sh. 209
- How much did Owaro pay after buying 2kg of maize flour and a loaf of bread?
- sh. 303
- sh. 293
- sh. 135
- sh. 259
- Work out the volume of the figure below
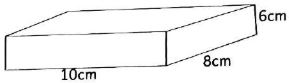
- 480cm3
- 480cm3
- 480cm3
- 480m3
- Delmonte Company processed 2540 litres of pineapple juice. A trader bought 995 litres of the pineapple juice. How many litres of the juice remained?
- 1645L
- 1655L
- 1745L
- 1545L
- It takes 3 weeks for eggs to hatch. How long is this period in days?
- 28 days
- 21 days
- 14 days
- 18 days
- The diagram below shows a roof of a house. Write the type of the angle marked b.
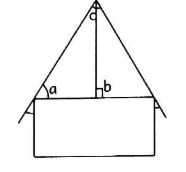
- Obtuse angle
- Acute angle
- Reflex angle
- Right angle
- Complete the pattern below. 80, 76, 72, ___,___, 60
- 68, 64
- 73, 74
- 64, 68
- 74, 76
- A farmer harvested n bags of beans, p bags of rice and 2w bags of millet. How many bags did she harvest altogether?
- b+r+2w
- n -p -2w
- n + p+ 2w
- n + p-2w
- Work out the following
H Min
8 30
- 6 55
______________- 1 hr 75 min
- 2h 25 min
- 1h 35 min
- 2 h 35 min
- A parking lot has 14 pick-ups. Each pick-up is charged sh. 212 per day. How much money is collected from the parking lot in a day?
- shs. 288
- shs. 2968
- shs. 2568
- sh. 2768
- Which statement can correctly fill the blank space below?
2/3 is __________ 8/12- greater than
- less than
- equal to
- larger than
- Work out:
12km 600m x 6 = ______- 72km 600m
- 74km 600m
- 75m 800m
- 75km 600m
The table below shows the number of fruits sold by a vendor in a day in Gikomba market. Use it to answer questions 29-30
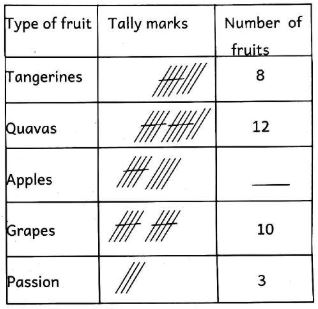
- Which fruit had the least number of sales?
- Quavas
- Passion
- Tangerines
- Apples
- How many fruits in total did the vendor sell?
- 40
- 39
- 42
- 41
MARKING SCHEME
- D
- B
- C
- D
- C
- D
- A
- A
- D
- C
- D
- C
- D
- B
- A
- D
- C
- A
- C
- D
- B
- D
- A
- C
- C
- B
- C
- D
- B
- C
Join our whatsapp group for latest updates
Tap Here to Download for 30/-
Get on WhatsApp for 30/-
Download Mathematics Questions and Answers - Grade 5 End Term 2 Exams 2023 Set 1.
Tap Here to Download for 30/-
Get on WhatsApp for 30/-
Why download?
- ✔ To read offline at any time.
- ✔ To Print at your convenience
- ✔ Share Easily with Friends / Students